Eskaintzak: Ingeniaritza Elektrikoa
Zuzendari akademikoa:
Juan Ignacio Sancho Seuma
Tecnun Saila / CEIT Taldea:
Tecnun Ingeniaritza Elektriko eta Elektronikoaren Saila
Deskribapena eta helburuak:
Proiektu honek metodo numeriko azkarreko software bat (CST Studio Suite) erabiliko du lurreratze-sareak simulatzeko. Sare eta lurzoru konbentzionalen emaitzak nazioarteko estandarrarekin (80. estandarra) bat datozenekin alderatu daitezke. Balio hauetan oinarrituta, lurzoru konplexuen, lurreratze-sarearen oxidazioaren, soldaduraren hondatzearen, tximisten eta beste faktore batzuen ondorioak aztertuko dira.
Zuzendari akademikoa:
Ibon Elósegui Simón
Tecnun Saila / CEIT Taldea:
Tecnun Ingeniaritza Elektriko eta Elektronikoaren Saila
Deskribapena eta helburuak:
Proiektu honek irtenbide berritzaile bat aztertzen du: olioaren hozte zuzena eroale ile-orratzetan txorrotadaren inpaktuaren bidez, potentzia-dentsitate handiko makina elektrikoetan aplikatuta.
CFD simulazioa erabiliz, ibilgailu eta hegazkin jasangarriak hornituko dituzten motor elektrikoetan bero-transferentzia nola optimizatu aztertzen dugu, galerak murriztuz eta fidagarritasuna handituz.
Emaitzek hozte-sistema eraginkorragoak diseinatzeko oinarri gisa balioko dute, aireko eta lurreko garraioaren elektrifikazioan lagunduz.
Zuzendari akademikoa:
José Martín Echeverría Ormaechea
Tecnun Saila / CEIT Taldea:
CEIT Garraio eta Energia Dibisioa
Gai-arloa:
Potentzia Elektronika, Aktuadore Piezoelektrikoak, Kokapen Nanometrikoa
Deskribapena eta helburuak:
Zehaztasun handiko kokapen-sistemetan erabiltzen diren aktuadore piezoelektrikoek tentsio altuak —normalean 100 V eta 150 V artean— eta haien izaera kapazitiboari lotutako korronte iragankorrak emateko gai diren potentzia-etapak behar dituzte. Aktuadore mota hauetarako kontrolagailu komertzialak existitzen diren arren, askok konfigurazio itxiak eta mugatuak dituzte, eta horrek haien errendimenduaren optimizazioa edo funtzionalitate berri eta espezifikoak sartzea oztopatzen du.
Proiektuaren helburu nagusia potentzia elektronikako sistema oso bat garatzea eta balioztatzea da, kokapen aplikazioetarako aktuadore piezoelektrikoen kitzikapen zehatza eta segurua ahalbidetzen duena. Sistemak kontrol seinale programagarriak sortu behar ditu (unipolarrak edo bipolarrak), aktuadore mota desberdinetarako egokiak diren tentsio tarteetan funtzionatu behar du, eta gailuaren portaera estatikoa eta iragankorra ebaluatzeko aukera ematen duen erantzun dinamikoa eman behar du.
Potentzia-etapak honako hauek izango ditu:
-
Piezoelektriko kitzikapenerako egokiak diren mailetara tentsio-bihurketa etapa baten inplementazioa (adibidez, boost topologiak, flyback edo tentsio handiko iturri linealak).
-
Korronte erreaktiboa eman eta doitasun-aplikazioetarako beharrezkoa den linealtasuna mantentzeko gai den anplifikazio-etaparen diseinua.
-
Arrapalak, profil dinamikoak edo proba-seinale sinusoidalak sortzeko beharrezkoak diren kontrol- eta modulazio-sistemen inplementazioa.
-
Barne-sentsazioa eta parametro gakoen monitorizazioa, hala nola aplikatutako tentsioa, berehalako korrontea edo sistemaren tenperatura.
Proiektu honek ikasleari tentsio handiko potentzia-bihurgailuen diseinuan, elektronika analogiko zehatzean, karga kapazitiboaren kontrolan eta babes-tekniketan sakontzeko aukera emango dio, eta, ondorioz, piezoelektrikoko modulu guztiz funtzional eta dokumentatu bat lortuko du.
Zuzendari akademikoa:
Luis Vitores Valcárcel García / Cristina Rodriguez
Tecnun Saila / CEIT Taldea:
CEIT – IKT Dibisioa / PTM
Gai-arloa:
Optimizazio Matematikoa, Datuen Zientzia, Materialak
Deskribapena eta helburuak:
Materialen ekuazio konstitutiboen parametroen optimizaziorako (literaturan ezagunak diren ereduak) software aplikazio sendo baten garapena (hobe Pythonen).
Helburua da modeloak datu esperimentaletara (Excel/CSV-tik irakurrita) egokitzeko zeregina automatizatzea, propietate mekanikoak aurreikusteko. Horretarako, optimizazio algoritmo desberdinak alderatu behar dira egokitze estrategia onena zehazteko. Proiektuak aplikazio batekin integratu edo dagoeneko existitzen den aplikazio baten oinarria izan beharko luke.
Proposatutako jarduerak:
-
Eredu konstitutiboen eta optimizazio algoritmoen literatura-berrikuspena.
-
Optimizazio-problemaren formulazio matematikoa (errore-funtzioa).
-
Datuen irakurketaren (Excel/CSV) eta ekuazio konstitutiboen inplementazioa.
-
Gutxienez bi optimizazio algoritmoren inplementazioa eta alderaketa (adibidez, Levenberg-Marquardt vs. Algoritmo Genetikoak).
-
Emaitzak kargatzeko, doitzeko eta bistaratzeko erabiltzaile-interfazearen garapena.
-
Softwarearen eta aplikatutako algoritmoen eraginkortasunaren baliozkotzea eta azterketa.
Begirale akademikoa:
Luis Vitores Valcárcel García
Tecnun Saila / CEIT Taldea:
IKT Dibisioa
Gai-arloa:
Optimizazio Matematikoa, Datuen Zientzia
Deskribapena eta helburuak:
Python aplikazio baten garapena datu esploratzaileen analisia (EDA) eta erregresio prediktiboaren modelizazioa automatizatzeko.
Helburua datu-base bat (CSV/SQL) irakurtzeko, aldagaiak automatikoki sailkatzeko (zenbakizkoak, kategorikoak), aldagai bakarreko eta bi aldagaiko analisi estatistikoak egiteko (korrelazioak, grafikoak) eta, azkenik, intereseko aldagai baterako erregresio-ereduak automatikoki aplikatu eta alderatzeko gai den tresna bat eraikitzea da. Helburua datu-zientziako proiektuak azkar abiarazteko software sendoa eskaintzea da.
Proposatutako jarduerak:
-
AutoEDA eta AutoErregresio tekniken berrikuspena.
-
Ingesta Modulua: Datuen irakurketa eta aldagaien sailkapen automatikoa.
-
EDA modulua: Azterketa estatistiko automatikoen eta grafikoen inplementazioa (aldagai bakarrekoak eta aldagaien arteko erlaziokoak).
-
Erregresio-modulua: Erregresio-algoritmo anitzen aurreprozesamendu automatikoa eta doikuntza/konparaketa (AutoML sinplifikatua).
Erabiltzaile interfazea: Emaitzak eta ikuspegiak bistaratzeko interfaze baten garapena (adibidez, Shiny).
Begirale akademikoa:
Luis Vitores Valcárcel García
Tecnun Saila / CEIT Taldea:
CEIT – IKT Saila
Eremu tematikoa:
Optimizazio Matematika, Datuen Zientzia
Deskribapena eta helburuak:
Mantentze-lanen programazioaren arazoa, Mantentze-lanen Programazioaren Arazoa bezala ere ezagutzen dena, mantentze-jarduerak denbora-tarte jakin batean modu optimoan antolatzea dakar. Arazo honen helburua etenaldiak eta funtzionamendu-kostuak minimizatzea da, bai mantentze prebentiboa bai zuzentzailea une egokietan egiten direla ziurtatuz.
Gradu amaierako proiektu honen helburua mantentze-lanen denborak modu eraginkorrean planifikatzeko optimizazio tresna bat garatzea da. Tresna batez ere Python-en garatuko da, Matlab edo R tresna gehigarri gisa erabiltzeko aukerarekin.
Ikaslearentzako proposatutako jarduerak:
1. Mantentze-lanen programazioan aplikatzen diren optimizazio-arazo eta algoritmo ohikoenei buruzko literatura-berrikuspena.
2. Problemaren formulazio matematikoa, dagokion irizpidea eta murrizketak ezarriz.
3. Soluzioaren inplementazioa optimizazio heuristikoko algoritmo bat edo kode irekiko ebazleak erabiliz.
4. Emaitzen azterketa eta aplikatutako ikuspegiaren eraginkortasunaren alderaketa, mantentze-egoera desberdinetan erabiltzeko gomendioekin.
Zuzendari akademikoa:
Emilio Sánchez Tapia doktorea
Tecnun Saila / CEIT Dibisioa:
CEIT – Ikusmena eta Robotika
Gai-arloa:
Industria-automatizazioa/robotizazioa
Deskribapena eta helburuak:
Gradu amaierako proiektu hau aurreko proiektu baten jarraipen zuzen gisa jaio zen, zeinak torlojuak kentzeko eragiketa bera arrakastaz automatizatu zuen. Lehen fase horretan, kontrol arkitektura sistema industrial tradizional batean oinarritzen zen, PLC bat erabiliz KUKA robota kontrolatzeko. Sistemaren bideragarritasun mekanikoa eta ikusmenezkoa balioztatu ondoren, proiektu berri honek kontrol arkitektura alternatibo eta malguago bat aztertzean jartzen du arreta.
Helburu berria, beraz, kontrola bi ikuspegi ezberdinetatik hurbiltzea da, haien errendimendua alderatzeko . PLC bat erabili beharrean, denbora errealean funtzionatzeko diseinatutako kontrolatzaile espezializatu eta oso fidagarria dena, prozesu bera ROS (Robot Operating System) erabiliz ezarriko da ohiko ordenagailu batean. ROS ez da Windows bezalako sistema eragile bat, baizik eta kode irekiko software tresnen multzo bat, roboten programazioa eta kamerak edo adimen artifizialeko algoritmoak bezalako osagaien integrazioa asko errazten duena. Azken helburua ikuspegi bakoitzaren abantailak eta desabantailak ebaluatu eta kuantifikatzea da: industria-PLC baten sendotasuna eta determinismoa, ROS oinarritutako sistema batek eta ordenagailu batek eskaintzen duten malgutasunaren, garapen-abiaduraren eta prozesatzeko ahalmenaren aldean.
Ikasleak egin beharreko zereginak:
-
Aurreko lanarekin ohitzea
-
Kuka Issy robotaren programazio teknika ikasten
-
ROS sistema eragilea nola erabili ikasten
-
ROSetik programatzea torlojutzeko/askatzeko ibilbideen sekuentzia baten exekuzioa (definitzeko hizkuntza, Python edo C++ izan daiteke)
-
Lortutako onuren probak eta ebaluazioa

PFG-n erabiliko den KUKA robot kolaboratiboaren argazkia.
Begirale akademikoa:
Luis Vitores Valcárcel García
Tecnun Saila / CEIT Dibisioa:
IKT Dibisioa. Datuen Azterketa eta Informazioa Kudeatzeko Taldea
Eremu tematikoa:
Optimizazio Matematika, Datuen Zientzia
Deskribapena eta helburuak:
Mantentze-programak orekatzeko arazoa, Mantentze-programazioaren arazoa edo Mantentze-planifikazioaren arazoa izenez ezagutzen dena, mantentze-jarduerak egutegi baten barruan modu optimoan antolatzean datza. Arazo honek etenaldiak eta funtzionamendu-kostuak minimizatu nahi ditu, mantentze prebentiboak zein zuzentzaileak une egokian egiten direla ziurtatuz.
Gradu amaierako lan honen helburua mantentze-lanen programazio eraginkorra bideratzen duen optimizazio-tresna bat garatzea da. Tresna hobe Python-en garatuko da, Matlab edo R aukera osagarriekin.
Ikasleari proposatutako jarduerak:
-
Mantentze-lanen programazioan aplikatutako optimizazio-arazo eta algoritmo ohikoenei buruzko literatura berrikustea.
-
Problemaren formulazio matematikoa, dagozkion irizpideak eta murrizketak ezarriz.
-
Irtenbidea ezartzea optimizazio heuristikoko algoritmoa edo kode irekiko ebazleak erabiliz.
-
Emaitzen analisia eta aplikatutako planteamenduaren eraginkortasunaren alderaketa, mantentze-egoera desberdinetan erabiltzeko gomendioekin.
Begirale akademikoa:
Emilio Sánchez Tapia
Tecnun Saila / CEIT Dibisioa:
Materialen eta Fabrikazio Dibisioa: Robotika eta Industria Kontroleko Taldea
Eremu tematikoa:
Robotika Ingeniaritza
Deskribapena eta helburuak:
mendeko robotikaren testuinguruan, fabrika konektatuaren kontzeptua sortzen da non makinak, robot mugikorrak eta gizakiak elkarrekin bizi diren. Robot mugikorrak manipulatzaile robotiko beso bat edo MoMa (MObile MANipulator) izan daitezke edo ez. Robot mugikorren kasuan soilik AMR (Autonomous Mobile Robot) edo AGV (Autonomous Guide Vehicle) izenez izendatu ohi da nabigazioan duen askatasun mailaren arabera (ikusi hurrengo irudia).
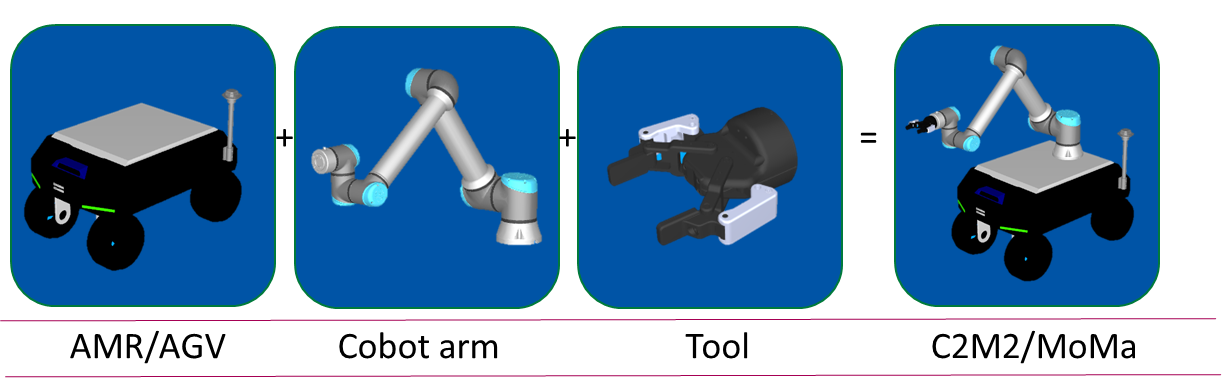
1. Irudia: Elkarlaneko robot baten elementuak plataforma batean (edo MoMa).
Mota honetako gailuen aplikazio nagusia fabrikaren automatizazio-maila handitzea da gaur egun automatizazioak barneratze txikia duten sektoreetan, hala nola intralogistikan eta makinen zaintzan. Eszenatoki hauetan, robotak lehengaiak, fabrikazio-prozesuko produktuak mugitu ditzake edo makinen ordezko piezak ere bilatu ditzake (adibidez, CNC baterako ebaketa-buru bat). Nolanahi ere, MoMak zeregina modu autonomoan edo giza-operadore baten laguntzaile gisa egin ahal izango du (ikusi hurrengo irudia).

2. Irudia: MoMa bat fabrikako beste baliabide bat bihurtzen den fabrikako eszenatokia, non bakarrik edo beste giza eragile batzuekin elkarlanean lan egin dezakeen.
Agertoki litekeena da fabrikan robot mugikor bat baino gehiago topatuko dugula, horietako bakoitzak gaitasun desberdinak dituena eta ziurrenik fabrikatzaile desberdinetakoak. Kasu honetan, garrantzitsua da zereginak koordinatzen dituen eta robot bakoitzaren erabilgarritasunaren eta/edo ahalmenaren arabera egoki banatzen dituen softwarea izatea. Software hau robot flotaren kudeatzailea izenez ezagutzen da.

3. Irudia: Flota-kudeatzaile batek robot multzo baten lana koordinatzen du.
Merkatuan flota kudeatzaileentzako irtenbide ugari daude, baina normalean jabeak eta robot marka bakarrarekin bateragarriak dira.
Gradu amaierako lanaren helburua kode irekiko robotiko flota kudeatzaile bat zabaltzea eta probatzea da. Probak simulazioan eta benetako robotekin egingo dira.
Dokumentu hau idazten den egunean, open-rmf (Open-RMF: https://www.open-rmf.org/) edo baliokidea erabiltzea aurreikusten da, ikusi hurrengo irudia.
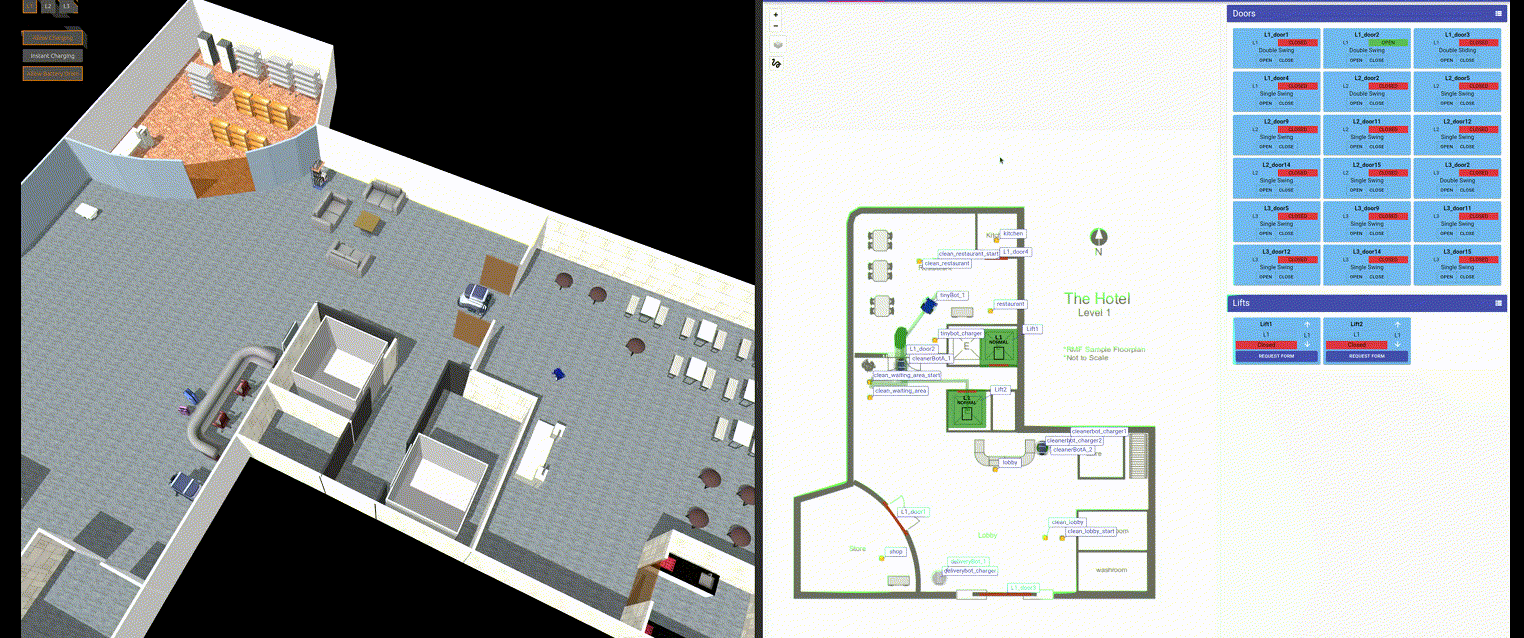
4. Irudia: flotaren simulazio koordinatu baten pantaila-argazkia open-rmf-tik.
Proiektuaren exekuzioan zehar honako hauek eskaintzen dira:
-
Ikertzaileen robotika taldean sartzea CEIT
-
Erabilitako software/hardware tresnetan trebatzea
-
Sektoreko enpresa batean lan eskaintza egiteko aukera
Gainbegirale akademikoa:
Ibon Elósegui
Tecnun . Ingeniaritza Elektriko eta Elektronikoko Saila
Eremu tematikoa:
Motor elektrikoak, mugikortasun elektrikoa.
Deskribapena eta helburuak:
Azken urteotan elektrifikazioa automobilgintzaren mundura iristen ari da modu atzeraezinean. Fabrikatzaile gehienek transmisio-ardatzdun motor erradialaren aukera hartu duten arren, pixkanaka-pixkanaka gurpil barruko motorrak sartzeko aukera aztertzen ari da, sistema mekaniko osagarriak saihesteko.
Proiektuaren helburua lehendik dauden gurpil-motorren artearen egoera aztertzea da. Hortik aurrera, motorren diseinu osoa egingo da ikuspuntu elektromagnetiko eta termikotik, elementu finituak erabiliz.

Gainbegirale akademikoa:
Emilio Sánchez Tapia
Dibisioa CEIT :
Informazioaren eta komunikazioaren teknologiak. 4.0 Industriarako Sistema Adimendunen Taldea. Ikusmena eta Robotika Azpitaldea
Eremu tematikoa:
Ingeniaritza robotikoa
Deskribapena eta helburuak:
4.0 industriak produktibitatea hobetzea eta lan-prozesuak arintzea helburu duten automatizazio forma anitzeko bidea ireki du. Testuinguru honetan, manipulatzaile mugikor adimendun bat garatu nahi da: robot mugikor autonomo baten teknologia eta hainbat eragiketa egiteko gai den lankidetzarako beso robotiko oso eraginkorra integratzen dituen robot mota berri bat.
Proiektuaren asmoa robot bat garatzea da, batetik bestera mugitu, oztopoak detektatu eta saihestu ahal izateko; bestetik, ikusmen artifizialaren bidez objektuak ezagutzeko ingurunea miatzea, eta, azkenik, piezak manipulatzea, langileekin elkarreraginean aritzeko gai izateko. Gaur egun benetako fabrika-inguruneetan eskatzen den eraldaketa digitaleko eredu bat ezartzeko, robotak, kontrol-elementuak, sentsoreak eta ontziratutako gainerako elementuak plataforma digital baten bidez konektatuta egongo dira, prozesua denbora errealean eta edozein lekutatik kontrolatzeko.
Orain CEIT Dagoeneko lehen prototipo funtzional bat garatu da (ikus hurrengo irudia).

GAP honen zeregina ataza-sekuentzia bat ROS-2pean programatzea izango litzateke, robotizatutako gelaxka klasiko batekin elkarreragin dezan robotak. Garatu beharreko kasu zehatza izango da robota prozesatu beharreko piezen biltegi batera joatea, gelaxkara hurbiltzea, prozesatzeko zain egotea eta dagoeneko sailkatuta dauden piezen beste biltegi batera eramatea.
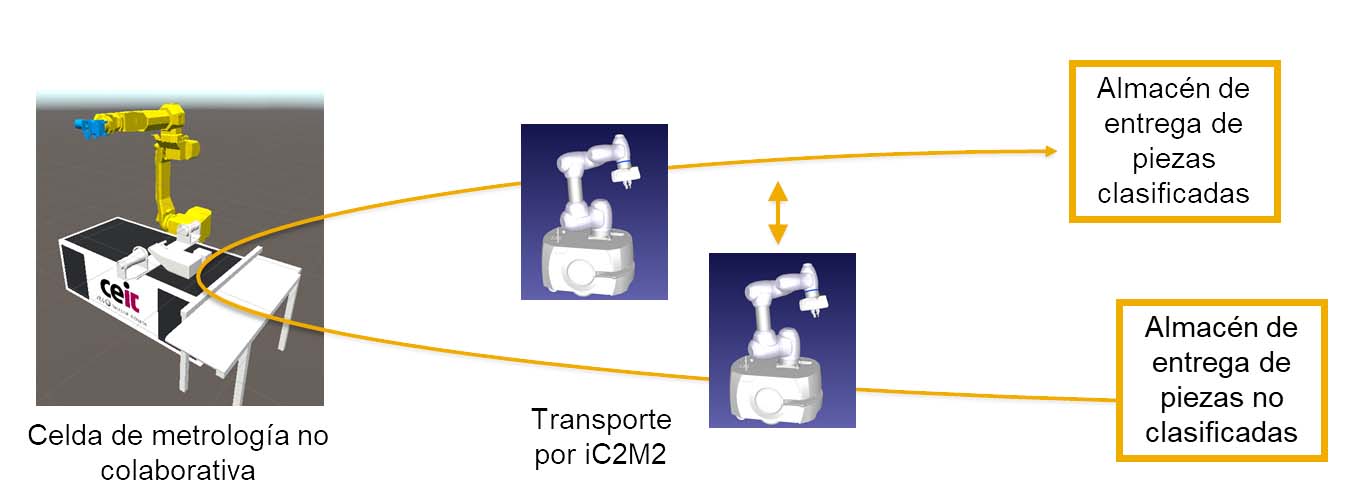
Zeregin sinple horren barruan, honako kontzeptu hauek frogatuko dira:
- Robotika mugikor kolaboratiboa
- Machine tending
- Indar-kontrola
- Bi gailu automatikoren sinkronizazio-problematika
C/C++, Python edo java-script-en programazio ezagutzak beharrezkoak dira.
Gainbegirale akademikoa: Miguel Martínez-Iturralde.
CEIT Dibisioa: Ibilgailu Elektrikoa eta Sare Adimendunak.
Arlo tematikoa: Ingeniaritza Elektrikoa.
Deskribapena eta helburuak: Azken urteotan hazkunde esponentziala izan da energia elektrikoko ibilgailu txikiekin lotutako aplikazio aeronautikoan: droneak, taxi hegalariak, aireratze bertikaleko ibilgailuak (VTOL), etab. Autonomia praktikoa duten ibilgailu hegalari elektrikoak lortzeko, ezinbestekoa da hauek osatzen dituzten osagaien pisua minimoa izatea. Motor elektrikoen kasuan, horrek esan nahi du potentzia-dentsitatea handitu egin behar dela, egungo soluzioen balioen gainetik.
GAP honetan potentzia dentsitate handiko motor bat diseinatu nahi da droneetan eta hegazkin elektriko txikietan aplikatzeko. Ikasleak tresna profesionalak erabiliko ditu osagai elektrikoak diseinatzeko eta simulatzeko, eta sistema bat garatzeak dakartzan arlo guztiak landuko ditu: elektromagnetikoa, termikoa, mekanikoa, etab.

Gainbegirale akademikoa: Miguel Martínez-Iturralde.
CEIT Dibisioa: Ibilgailu Elektrikoa eta Sare Adimendunak.
Arlo tematikoa: Ingeniaritza Elektrikoa.
Deskribapena eta helburuak: Aplikazio aeronautiko hibridoen eta guztiz elektrikoen garapena errealitate bat da, eta asko dira eskala txikian aeronautika isilago baten bideragarritasuna erakutsi duten proiektuak, ingurumena errespetatzen dutenak. Zentzu horretan, sektore elektrikoko eragile handiak (Airbus, Boeing, Rolls-Royce, etab.) ahalegin handiak egiten ari dira hegazkin komertzialen elektrifikazioari.
Elektrikoki propultsatutako hegazkinak garatzeko erronketako bat altuera handietan jardun dezaketen goi-tentsioko isolamendu elektrikoko sistemen diseinuarekin lotuta dago, airearen presioa oso txikia baita eta deskarga elektrikoak gertatzeko arrisku handiagoa baitago. Gaur egun, Ceit Europako proiektu batean murgilduta dago, eta etorkizunean aireontzi elektrikoetan aplika daitezkeen isolamendu-sistemak garatzea du helburu.
GAP honen helburua elementu finituen software komertziala erabiliz hegazkinen sistema elektrikoak simulatzea eta hegazkin elektrikoetan gero aplikatzeko diseinu-irizpideak lortzea litzateke.

Gainbegirale akademikoa: Marco Satrústegui.
CEIT Dibisioa: Ibilgailu Elektrikoa eta Sare Adimendunak.
Arlo tematikoa: Ingeniaritza Elektrikoa.
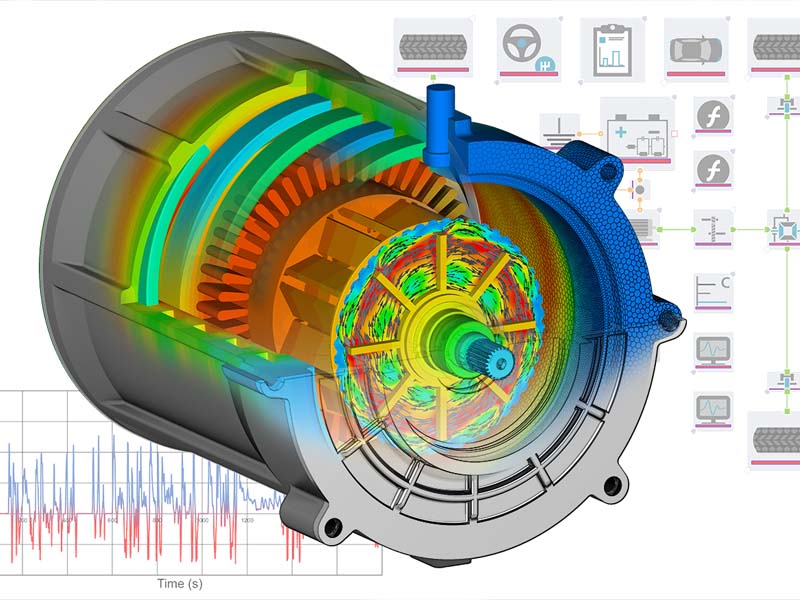
Deskribapena eta helburuak: Motor elektrikoek sortzen duten zarata gero eta garrantzi handiagoa hartzen ari da, erosotasuna oso garrantzitsua den sistemetan txertatuta dagoelako (adibidez: auto elektrikoak). Ildo horretan, GAP honek motor elektriko baten zarata ezaugarritu nahi du, analisi multifisiko bat eginez. Hasteko, makina maila elektromagnetikoan eta termikoan karakterizatzen du, eta, ondoren, analisi mekaniko bat egiten da, sortutako zarata hainbat momentu-mailatan eta biraketa-abiaduran lortzeko.

Gainbegirale akademikoa: Jesús Paredes.
CEIT Dibisioa: Ibilgailu Elektrikoa eta Sare Adimendunak.
Arlo tematikoa: Ingeniaritza Elektrikoa.
Deskribapena eta helburuak: Azken hamarkadan, hegazkinen sistema osagarri asko (pneumatikoak, hidraulikoak eta mekanikoak) eragingailu elektrikoekin edo hibridoekin ordezkatu dira, berotegi-efektuko gasen emisioa murrizteko pizgarriak eta eragiketa- eta mantentze-kostuak murriztu direlako. Horrek hegazkinetan instalatutako potentzia elektrikoaren igoera handia ekarri du.
Tradizioz, turbinak sistema pneumatiko baten bidez abiarazten ziren, eta aireontziaren sistema elektrikoak elikatzeko behar zen energia turbinei akoplatutako sorgailuen bidez sortzen zen. Gaur egun, bi sistemak motor eta sorgailu gisa funtzionatzeko gai den makina elektriko bakar batean elkartu dira. Sistema horien artean hegazkinen turbina abiarazleak/sorgailuak daude. Energia elektrikoaren eskaera handitzeak eta abiarazleentzako/sorgailuentzako espazio mugatuak makina horien potentzia-dentsitatea handitzea eskatzen dute.
Makina elektriko baten tamaina, eta, beraz, pisua eta kostua, funtsean, bero-erauzketa eta fabrikazioan erabilitako materialen tenperatura-mugak zehazten du. Olio bidezko hozte-sistemek ezaugarri oparoak dituzte. Olio bidezko hozte-sistema guztien artean (spray, oil-dripping), olioz betetako estatore-sistemak landu nahi dira proiektu honetan.
Proiektu honen helburua ikasleak fluidoak simulatzeko tresnak eta hozte-sistemak ezagutzea da, eta ondorioak ateratzea abiazio-motorren olio bidezko hozte-sistemak optimizatze aldera.
Gainbegirale akademikoa: Gurutz Artetxe.
CEIT Dibisioa: Ibilgailu Elektrikoa eta Sare Adimendunak.
Arlo tematikoa: Ingeniaritza Elektrikoa.
Deskribapena eta helburuak: Indukzio bidezko beroketa, metodo eraginkorra eta azkarra da beroa sortzeko. Metalak epeldu, soldatu edo urtu behar diren hainbat aplikaziotan erabil daiteke. CEITek kalkulu-tresnak garatzeko interesa du (aurretik garatutako tresna multzo batean oinarrituta), enkofratuetarako indukziozko berogailu-sistemen diseinuan erabiltzeko. Proiektu honen helburua enkofratuak berotzeko sistema baten portaera elektromagnetikoa eta beroketa modelatzea da, eta horiekin kasu praktiko baten diseinua gauzatzeko optimizazio azterketak egitea.
- Profila/Gradoa: Teknologia Industrialak, Mekanika, Elektrizitatea, Industria Elektronika.
- Gainbegirale akademikoa: Juan Carlos Ramos.
- Saila/Arloa: Ingeniaritza Mekaniko eta Materialen Saila / Ingeniaritza Termiko eta Fluidoen arloa.
- Deskribapena: Desberdintasun Finituen Metodoaren bidez, transformadore baten nukleoan eta barruko bobinetan beroa sortzeko eta eroateko eredu termiko bat ebaztea da kontua. Ereduen ekuazioak eta Gauss-Seidelen metodo iteratiboaren bidezko ebazpena Matlab-en ezarriko dira. Bero transferentzia arazoak aplikatuko dira. Informazio gehiagorako, jarri harremanetan irakaslearekin.